近期,我校机械与电气工程学院姚立国副教授在智能制造领域TOP期刊发表两篇研究论文。在《Expert Systems With Applications》(中科院SCI一区,IF=7.5)发表题为“Adaptive multi-step path planning for multi-robot in dynamic environments based on hybrid optimization approach”的研究论文。在《Knowledge-Based Systems》(中科院SCI一区,IF=7.6)发表题为“Multi-robot consistent formation control based on novel leader-follower model and optimization motion planning approach”的研究论文。
在《Expert Systems With Applications》发表的论文研究设计出一种新的多机器人路径规划目标控制方法,用于增强机器人路径规划中的全局优化。该方法主要提出三个创新点:动态概率完成机制、自适应收敛加速因子以及平衡的探索-开发权衡参数,有效解决机器人路径规划中难以避免局部最优、路径规划算法开发行为不足和动态复杂环境中搜索最优路径的概率完备性较低等路径避障局限性问题,并且能够在复杂障碍物地图中规划出一条无碰撞且移动距离最优的运行路径。通过路径规划对比实验和多种评估指标验证,所提方法展现出良好的路径规划精准度和稳定性能。
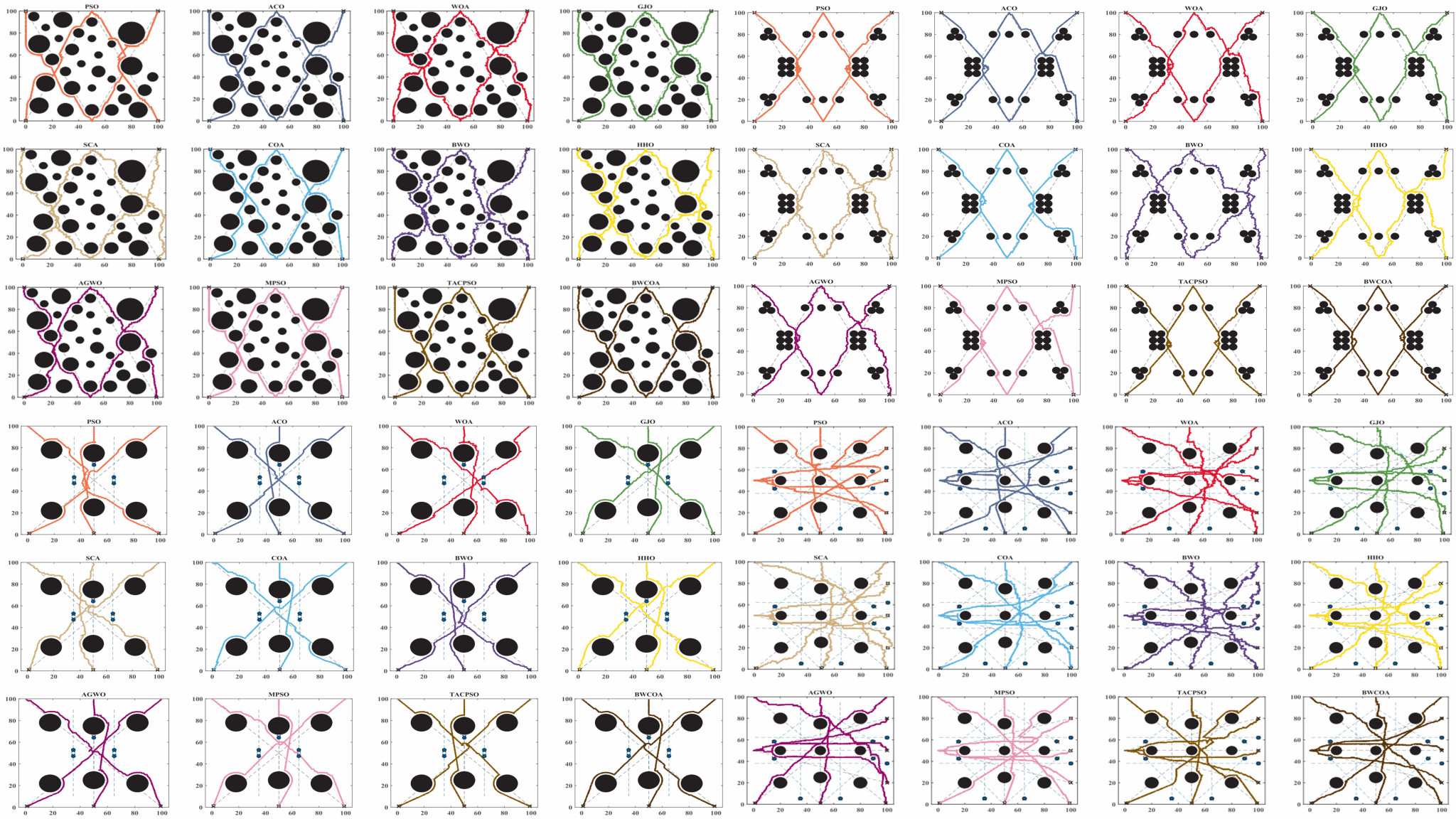
机器人动态障碍地形路径轨迹效果图
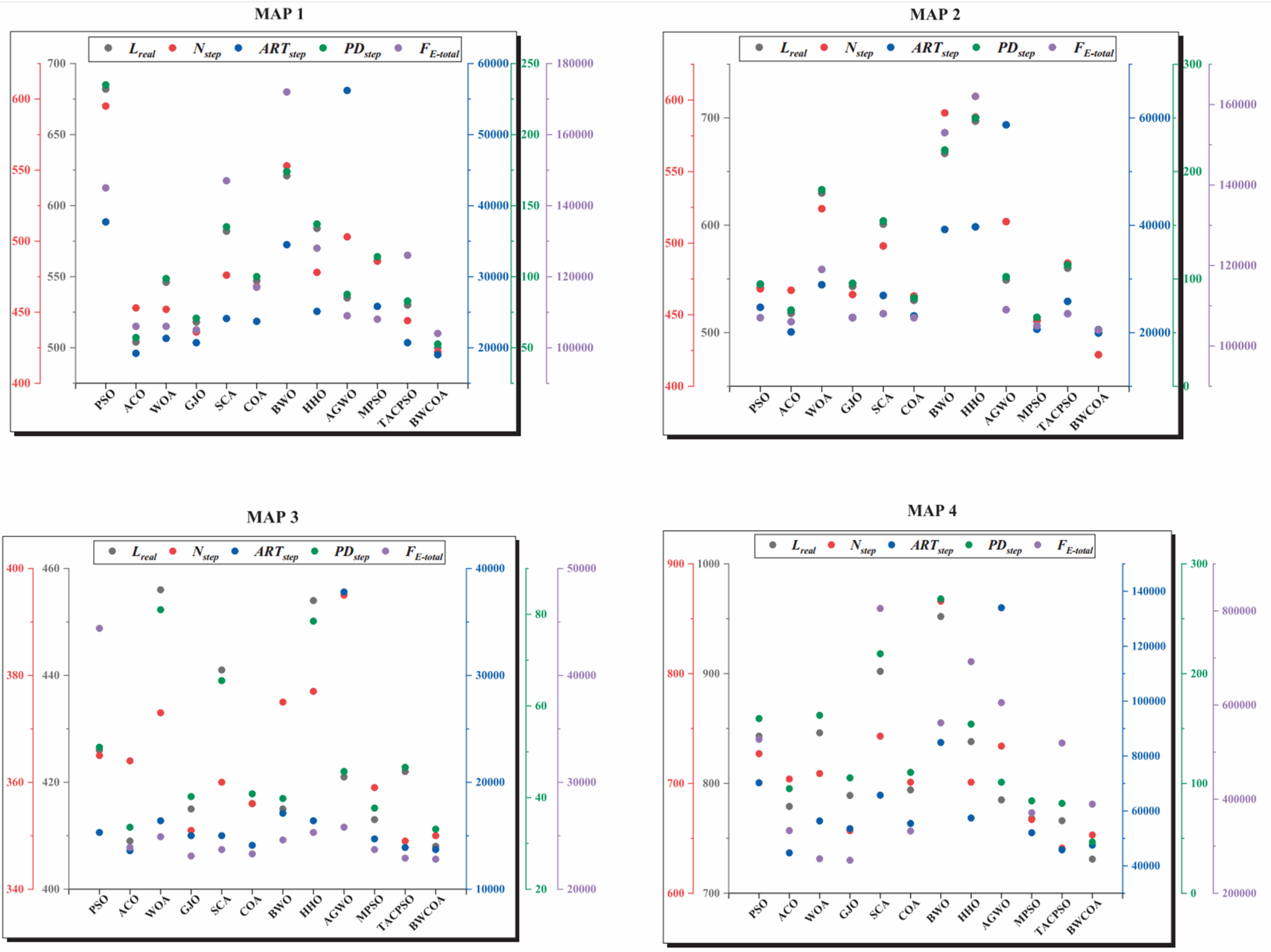
机器人路径规划实验评估指标多轴散点图
在《Knowledge-Based Systems》发表的论文研究设计出一种新型分层式领航者-跟随者编队多机器人路径规划控制方法。该方法针对路径规划真实场景复杂性、即时性和位置自适应性的要求,有效解决了多机器人路径规划和编队控制中路径轨迹误差较大、编队行进速度分配不合理以及编队适应性较差等问题。能够高精准、高效率调节并行控制领航者和跟随者的运行轨迹、位置和速度等相关一致性状态因素,实现编队控制系统达到多机器人协同运动与规划的目标。最后通过在多项路径规划编队控制评估指标上验证,所提方法展现出较好的路径规划精准性能和编队控制稳定性能。
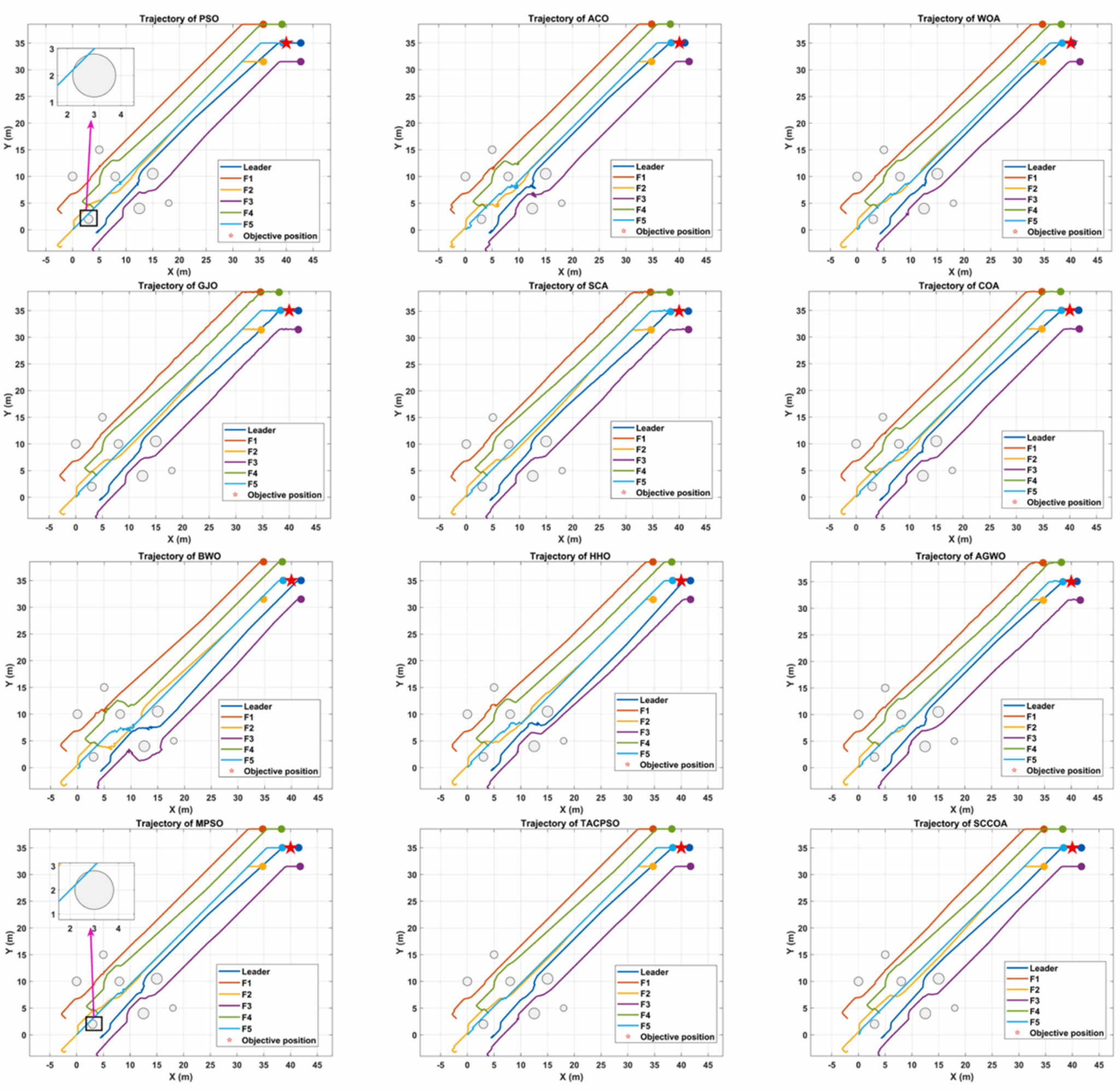
机器人分层式领航者-跟随者编队路径轨迹图
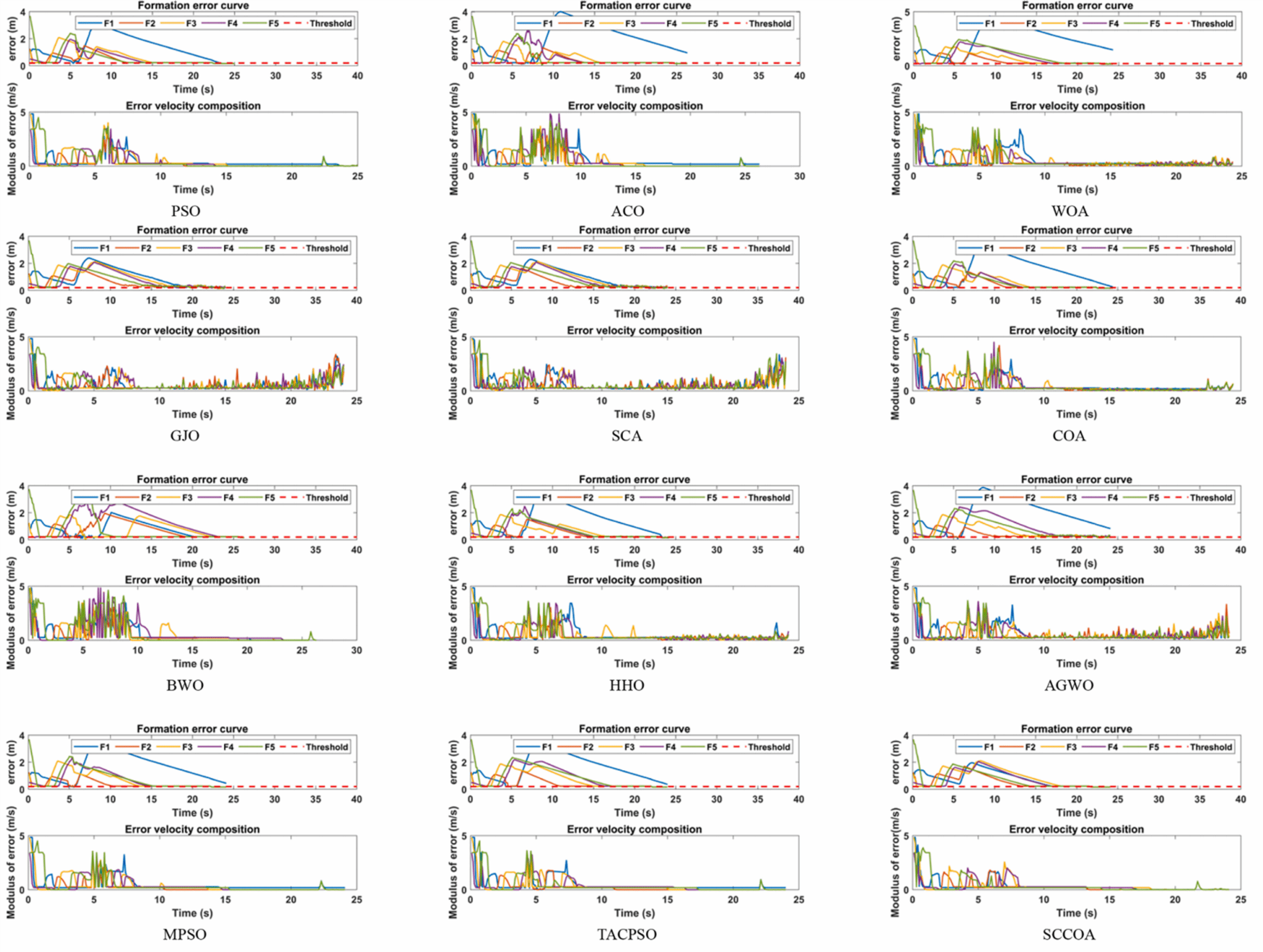
机器人编队误差变化和速度合成误差曲线图
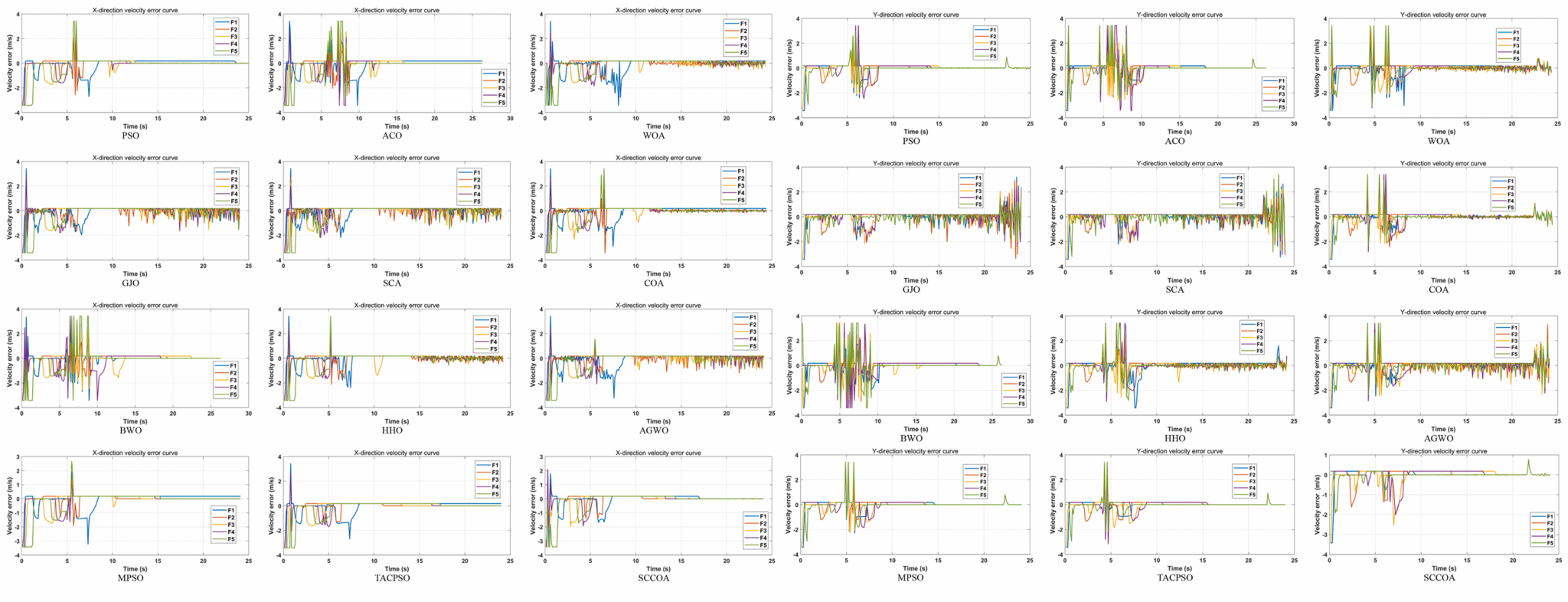
机器人编队在x和y方向上的速度误差曲线图
两篇论文的第一作者均系姚立国副教授。研究得到了国家自然科学基金(72061006)、贵州省基础研究计划(自然科学)(黔科合基础-ZK[2024]一般424)、贵州省基础研究项目(自然科学)一般项目(黔科合基础-MS[2025]246)、贵州省教育厅自然科学研究项目(青年科技人才成长项目)(黔教技[2024]41号)和贵州省科技平台项目(ZSYS[2025]011)的联合资助。
论文全文链接:
(1)https://doi.org/10.1016/j.eswa.2025.129699
(2)https://doi.org/10.1016/j.knosys.2025.114590
